
About me
My primary research interests are motion planning and control for mobile robots. In the future, I plan to expand my focus to include legged robots or wheel-legged robots, as I believe wheel-legged robots are the most efficient configuration for navigating artificial environments.
I believe robotics should solve structural challenges beyond biological evolution—like combining wheels with multi-jointed legs, a structure evolution alone cannot achieve. Robotics can make this possible, allowing us to fully harness a robot's capabilities through autonomous control to perform tasks impossible for biological species or hazardous for humans. This vision fuels my passion for mobile robots, especially wheeled-legged designs.
I am deeply fascinated by robotics's future and committed to advancing research in this field. If you're interested in discussing my work or potential collaborations, email me.
Skills
Programing: C/C++, python, ROS, Git, LaTeX, Matlab
Design: Fusion 360, Recurdyn, Blender, Sloidworks, Altium Designer, 3D Printing, CNC
Microcontroller: Raspberry Pi, Jetson Nano, Stm32, Esp32, Arduino, OpenMv, K210
Video edit: Photoshop, Premier, After Effects
Publications
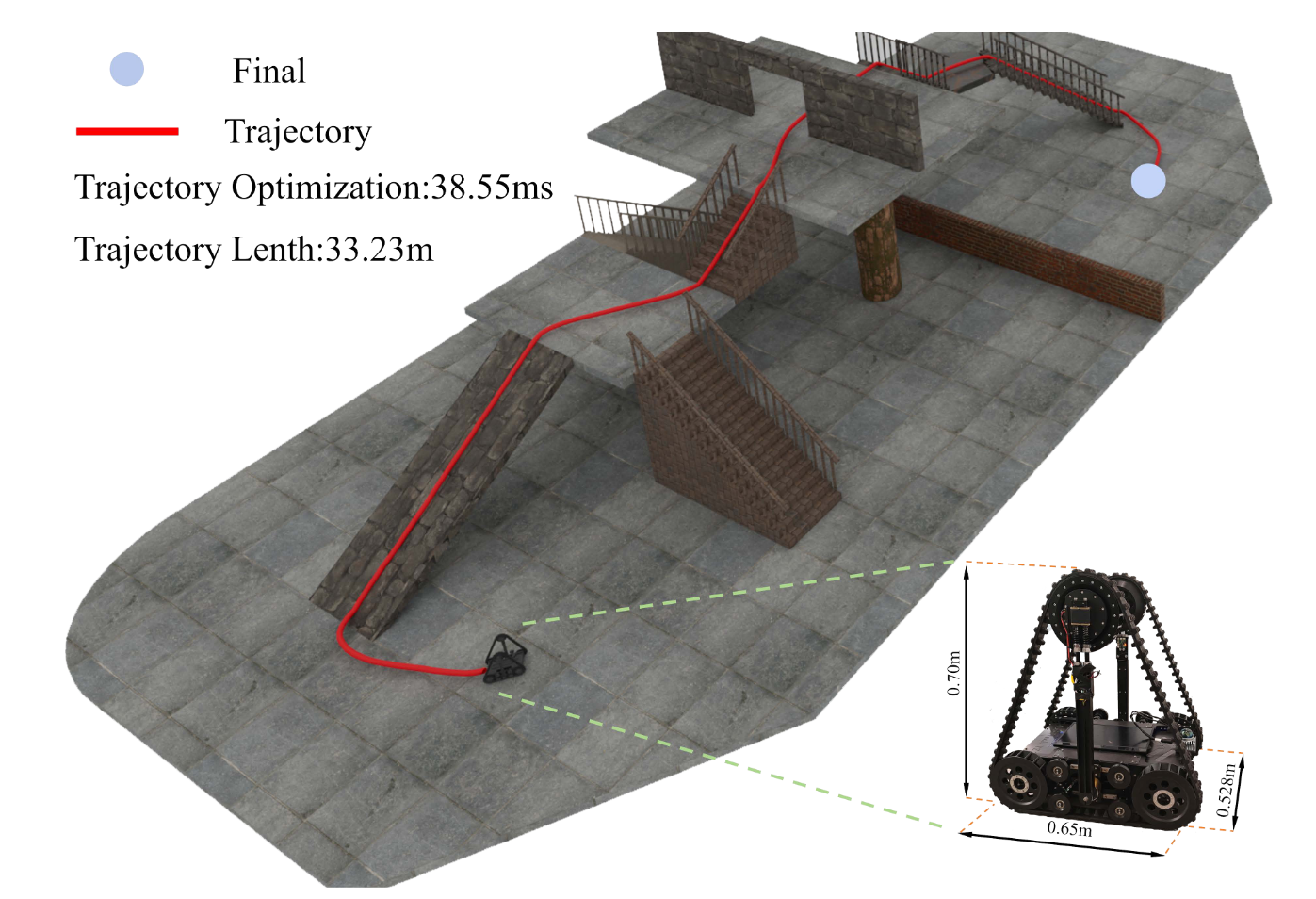
Efficient Trajectory Generation Based on Traversable Planes in 3D Complex Architectural Spaces (ICRA 2025)
Mengke Zhang†, Zhihao Tian†, Yaoguang Xia, Chao Xu, Fei Gao, Yanjun Cao

Novel design of Reconfigurable Tracked Robot with Geometry-Changing Tracks (IROS 2024)
Chice Xuan†, Jiadong Lu,† Zhihao Tian, Jiacheng Li, Mengke Zhang, Hanbin Xie, Jianxiong Qiu, Chao Xu, and Yanjun Cao
Paper | Video
Interesting projects

A split Bluetooth keyboard
Free your hands regardless of keyboard size(Not easy to use)
Origin project: Corne
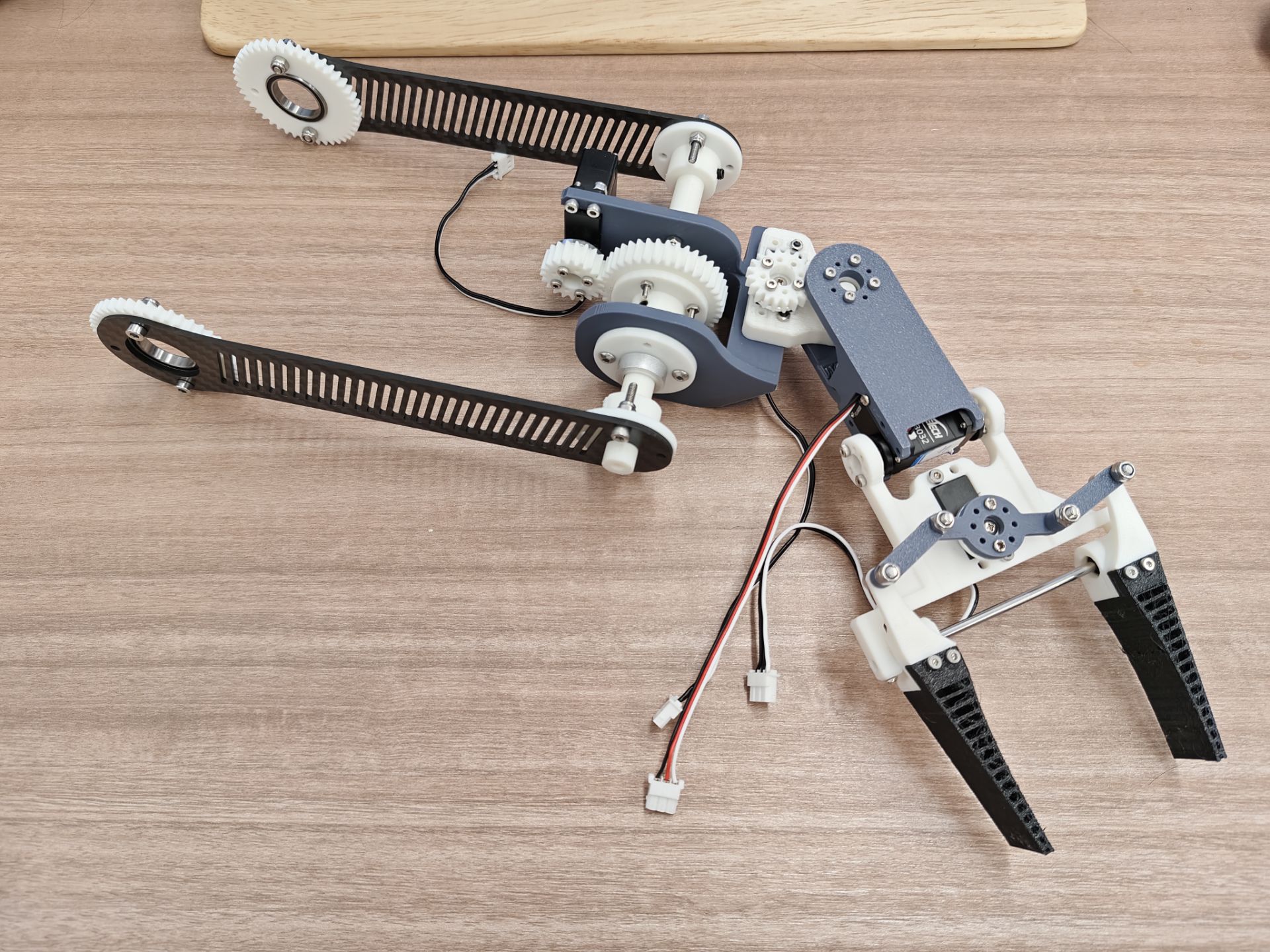
A 5-DOF robotic arm mounted on a UAV
A robotic arm specially installed on the drone, driven by a servo, with a flexible gripper that can easily grab objects weighing 100g.
References: CHAT-PM
(The original author did not open source this robotic arm, but it is a very cool design, so I reversed their design based on the pictures in the paper.)
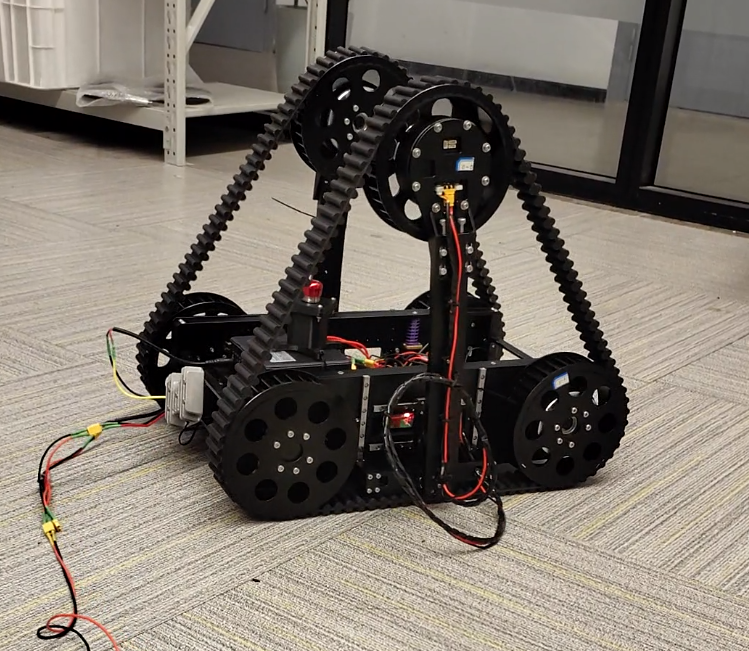
The first version of CubeTrack
I made this version of cubetrack with Zelong Xia, Chice Xuan, it has many flaws in hardware and program, but it is really cute and tiny, it only has a footprint of 50cm*40cm, but it can climb stairs at a speed of 1m/s, and then the system crashed...
New version cubetrack's website: CUBETRACK

HoloCubic:Transparent display desktop station
The first hardware project completed during my college, it uses a beam splitter prism to achieve the effect of pseudo-holographic projection. It can display the time and weather in real time, or play animations.What's interesting is that it switches functions by changing the posture of the desktop.
Origin project: HoloCubic
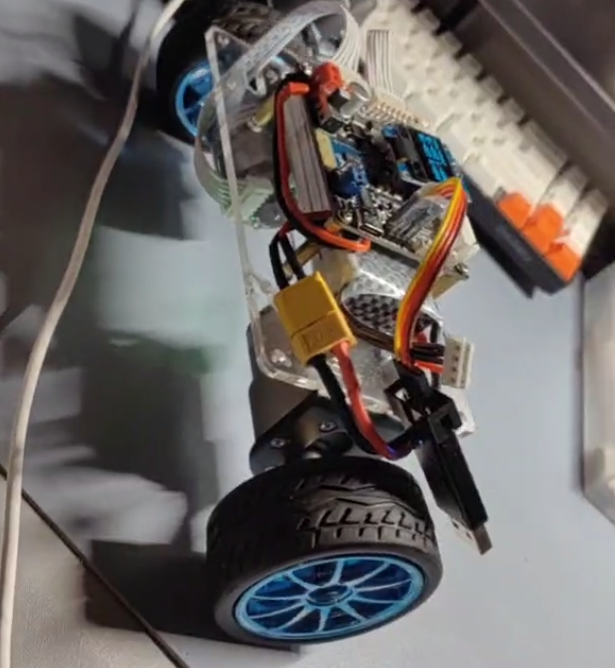
Balance Car
Equipped with imu to obtain the status of the balance car, maintain balance through pid control, and can use a smartphone to control movement via Bluetooth